| filebase | forums | discord | server | github | wiki | web |
| cubebot | epodbot | fritzbot | gravebot | grogbot | hpbbot | ivpbot | jkbotti | joebot |
| meanmod | podbotmm | racc | rcbot | realbot | sandbot | shrikebot | soulfathermaps | yapb |


 Autonomous fragmachines by PMB
Autonomous fragmachines by PMB 



development screenies |

|

|
(#1)
|
|
Roi de France

Status: Offline
Posts: 5,049
Join Date: Nov 2003
Location: 46°43'60N 0°43'0W 0.187A
|
Hello
 Just thought it would be a good idea to put some screenies in a separate thread to show a bit of the progress of RACC... here goes! first one 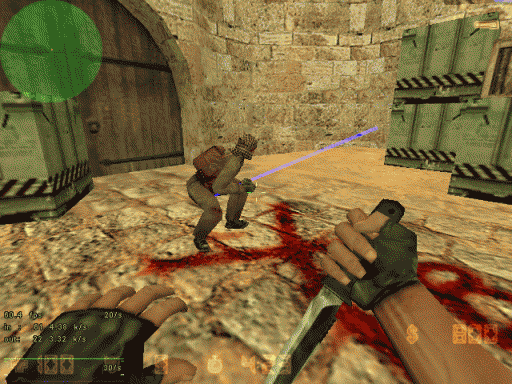 this is for me the first proof that the cognitive system of the RACC is working well. These bots really decide WHAT they want to do and think about HOW they will do it! this may sound very little for you but it means a lot for a bot. Here you can see the first RACC bot which decided to plant a bomb by itself, and not because I've told it to ... okay, this one needed a lot of work, so just for testing now, the bot's duties and desires will be hardcoded. But the infrastructure is such that it will be very easy for it to be plugged into a database, turning this bot in an expert system !  RACC home - Bots-United: beer, babies & bots (especially the latter) "Learn to think by yourself, else others will do it for you." |
|
|

|
Re: development screenies |
|
|
|
(#2)
|
|
Roi de France
Status: Offline
Posts: 5,049
Join Date: Nov 2003
Location: 46°43'60N 0°43'0W 0.187A
|
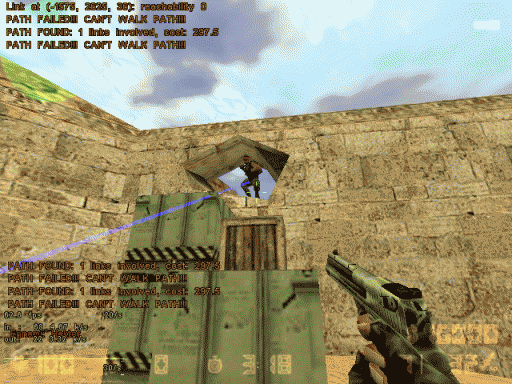 another one for the road, here it's the FIRST racc bot EVER to go through that tiny hole. I was having a LOT of problems with the ability of the bots to follow paths accurately all the way, because contrarily to bots like POD-bot and other ones, these bots are not following their paths as if they were on a track (meaning, they don't face perfectly their next waypoint until they reach it exactly, jumping right on time with the right speed, moving on the same path always and then skipping to the following waypoint etc.) Here the bots press the forward, strafe, jump and duck keys just like humans, continuously deciding which key to press by evaluating their environment... that's what makes it so difficult to evaluate when they have "reached" a navigation node and when they should skip to the next one. Anyway, I've been rewriting the BotWalkPath() function today and seeing that I believe I'm on the right track  RACC home - Bots-United: beer, babies & bots (especially the latter) "Learn to think by yourself, else others will do it for you." |
|
|
|
Re: development screenies |
|
|
|
(#3)
|
|
Guest
Status:
Posts: n/a
|
wow thats looking amazing PMB
and the bot still navigates completely autonomously with no help whatsoever?and there i was thinking that such tricky movement was *almost* impossible without any kind of hint lol  |
|
|
|
Re: development screenies |
|
|
|
(#4)
|
|
aka: memed / Server Admin

Status: Offline
Posts: 705
Join Date: Jan 2004
Location: germany
|
nice indeed, i hope for faster servers to handle some of those bots :-)
|
|
|
|
Re: development screenies |
|
|
|
(#5)
|
|
Ex-Council Member

Status: Offline
Posts: 1,090
Join Date: Nov 2003
Location: Canada
|
PMB this is impressive. How's the performance, is lag an issue due to the amount of processing?
"In theory, there is no difference between theory and practice. But, in practice, there is." - Jan L.A. van de Snepscheut |
|
|
|
Re: development screenies |
|
|
|
(#6)
|
|
Guest
Status:
Posts: n/a
|
So, Pierre-Marie, what capabilities will you bot have in this upcoming preview... we know you have a very brilliantly customized navigational system, but what does the combat and objective systems look like? (It sounds as if you're reffering to them as having "emotions" since they "want" to plant the bomb, etc.???)
|
|
|
|
Re: development screenies |
|
|
|
(#7)
|
|
Guest
Status:
Posts: n/a
|
very nice the whole project
its great that you make this amazing things in your freetime (i saw people making things worse and they get paid for it i dont want to say names [ \ / 4 L \ / 3] i want to give some feedback i hope you continue the work and i look forward to the result if you wait 5-7 years (then i will have finished school and finisching study coding) than i will help you with the coding work ok? |
|
|
|
Re: development screenies |
|
|
|
(#8)
|
|
Roi de France
Status: Offline
Posts: 5,049
Join Date: Nov 2003
Location: 46°43'60N 0°43'0W 0.187A
|
lol OK
I sincerely hope the bot will be finished before that date though @Fooska Following discussions I had with STIcazzi-Slayer on Nukebox a long time ago, I will try to make the bots follow two basic instincts, the desire and the duty, both of them maybe conflicting each other. I am currently working on the duty part, and especially the "goal" selection. Since I don't want to implement a task queue in my bot (because I believe all the actions of an individual must be the expression of the thought of each instant), I have a system in which the bot knows about what it is doing in several levels of cognition. The first level is the task, that is, what the bot is doing right now (e.g, walking a path, defusing a bomb, thinking about a route, etc.) At a deeper level is the goal, which encompasses the task, and make the bot able to remember the greater plan behind the single task it's doing right now. The last level is the mission objective, which does not belong to the bot but to the whole team (as in a "collective consciousness", although this term is greatly exxagerated  ). Don't be afraid however, this is not much coding at all, rather a long-time thought-of design. ). Don't be afraid however, this is not much coding at all, rather a long-time thought-of design.@botmeister: curiously the lag issue is not as important as in the 1st template. There are still a lot of things to optimize in the code, but it runs quite OK so far. I believe that in the tempate #1 I must have made something terribly wrong regarding this issue. I'm also fighting hard to make a REALLY efficient BotWalkPath() function, since it will be the BASE to test all the rest. I'm unable to test the desire/duty behaviour of the bot if it fails in getting from point A to point B. So far I'm getting closer to the podbot level regarding this issue, hmm... I'd say I'm currently at the realbot WIP level RACC home - Bots-United: beer, babies & bots (especially the latter) "Learn to think by yourself, else others will do it for you." |
|
|
|
Re: development screenies |
|
|
|
(#9)
|
|
Guest
Status:
Posts: n/a
|
Your bots have really evolved, Pierre-Marie. I found a link to your site(racc-ai.com) almost a year ago, and since then, I've checked back every once and awhile to see how everything was coming. Props on all of your hardwork, it's really paying off.
|
|
|
|
Re: development screenies |
|
|
|
(#10)
|
|
Roi de France
Status: Offline
Posts: 5,049
Join Date: Nov 2003
Location: 46°43'60N 0°43'0W 0.187A
|
Another development screenie, this one rather talks for itself...
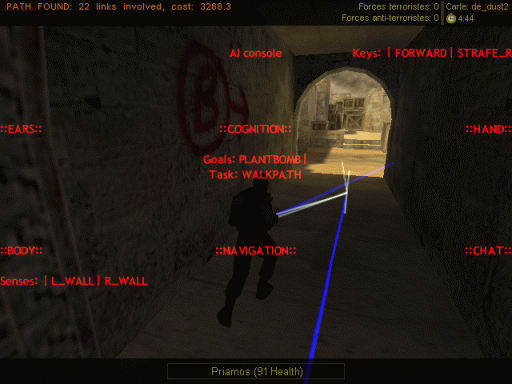 As you can see I'm still in the WalkPath / cognition system stuff; the WalkPath function gets better but really slowly, because it's a really complicated one and honestly since I don't have much time to spend on it each day I prefer coding miscellaneous funny stuff, such as the AI console you see This one enables me to display each part of the bot AI in real-time for the bot I am spectating. The left column is the sensing part (eyes, ears, body), the right one is the moving part (legs, hand, chat), the middle ones are the other ones I didn't know where to put You can see how the cognition stuff will work BTW: the goal(s) and the task. Each bot can have one or several goal, and in order to get closer to one of them it picks up a task. Here the bot thinks "I must plant that damn bomb" and knows "I'm walking towards the freaky bomb spot (what for? to plant that damn bomb)". Phew, it's exhausting. RACC home - Bots-United: beer, babies & bots (especially the latter) "Learn to think by yourself, else others will do it for you." |
|
|
|
 |
«
Previous Thread
|
Next Thread
»
| Currently Active Users Viewing This Thread: 1 (0 members and 1 guests) | |
|
|

Powered by vBulletin® Version 3.8.2
Copyright ©2000 - 2024, Jelsoft Enterprises Ltd.
vBulletin Skin developed by: vBStyles.com
Copyright ©2000 - 2024, Jelsoft Enterprises Ltd.
vBulletin Skin developed by: vBStyles.com